…projects:
…2019-2021:
TH04010329 - Autonomous robotic building system (TAČR - Technology Agency of the Czech Republic)
The main goal of the project is the development of a functional prototype of an autonomous robotic building system that enables accurate and fast building production with reduced number of construction workers. The system will focus on additive production (load-bearing and non-load bearing walls), accurate mortar walling (foundations, load-bearing walls and partitions), thermal insulation and surface painting. The autonomous system will be based on the object-oriented building documentation (BIM) and using the built-in converter will export the building model to the interface of industrial robots. The system prototype will be operational within three years from the start of the project. Model objects will be made in 1:1 scale. Support resources will be used for prototype development including HW and SW elements and production of test samples.


…grants:
…2018-2019:
CZ.02.1.01/0.0/0.0/16_017/0002625 - Innovative Laboratory and Testing Infrastructure for Doctoral Study Program of Building Structures (CTU in Prague, Faculty of Civil Engineering)
122.C | Innovation equipment for laboratory of Robotization of building process for finishing work. Development and production of work tools and vacuum suction tools for masonry work. The working tool (grip) ensures the technological processes of the brickwork: depalletization - removal of the piece element (the masonry element) from the place of delivery (pallets, packaging, etc.), centering of the brick at the transfer table, capturing, relocating a brick element to goal place; positioning the brick element at the exact position in the structure (according to the entered coordinates), applying a mortar to the brick element (will be on a replaceable greifer); preparing the shape and size of elements by precise cutting.



…2017-2019:
SGS17/165/OHK1/3T/11 - Modelling of Industrial Robotic Masonry System (CTU in Prague, Faculty of Civil Engineering, K122)
The project was devoted to the design of a functional model of a masonry robot. The output of the project was an industrial robot that will be able to technically implement the complete bricklaying process. The system will be in scale 1:3 to 1:4 down and will be able to complete the part of wall of the object. With the help of a specially developed software, the robotic masonry system can convert the necessary mathematical model data from the BIM environment to the KUKA KRC4 industrial robots and perform optimum robotic hand motion design. During the project will be developed: a functional model of a robotic masonry system, including the development of technology (depalletization, method of controlling movements, cutting bricks to needed size); SW for data migration (IFC -> KRC4), technical equipment (grip, mortar application, brick cutting, control equipment); control element including optimization procedures (energy, time, material consumption).
website of project...
…2015-2016:
SGS15/126/OHK1/2T/11 - Functional model of a painting robot (CTU in Prague, Faculty of Civil Engineering, K122)
The project was devoted to the design of a functional model of a painting robot. The output of the project was a robot, created in a scaled-down scale, capable of using a control unit and special computer programs to paint a small area of the wall with paint. During the project, a functional robotic paint nozzle, a moving part (robotic arm), a control including optimization procedures (energy, color, time) were developed.
website of project...
…experiments and other activities:
…2019:
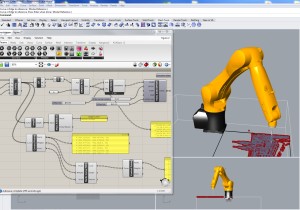
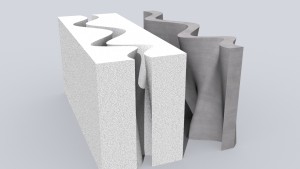
Experiment v.3.0 - Modelling of Concrete Architectural Elements: Lamp Base (CTU in Prague, Faculty of Civil Engineering, K122 + EC)
Design and visualization of object in simulation software Rhino 6.0, simulation and animation of production process using SW Grasshopper, modelling and programming of robotic movements (Grasshopper + KUKA|prc), production of formwork from polystyrene by RHWC method, process of formwork realization, its processing and final concreting.



Experiment v.2.0 - Painting robot and image processing (CTU in Prague, Faculty of Civil Engineering, K122)
Picture design and visualization in simulation SW Rhino 6.0, tracing tool center point of robotic hand, vectorization and optimization (Improved Business Traveller Method (division of each image to 3600 rectangles), reducing the trace off length from 300m to 30.8m), modelling and programming of robotic movements (Grasshopper + KUKA|prc), production of large-area images, final processing and framing.


Experiment v.1.0 - Modelling of concrete architectural elements (CTU in Prague, Faculty of Civil Engineering, K122)
Modelling and production of complex concrete architectural elements using industrial robots.


Laboratory RSP - Laboratory equipment for robotization of building processes (CTU in Prague, Faculty of Civil Engineering)
Robot installation, installation of safety elements (first aid kit, portable fire engine, instructions and information boards), installation of wiring boxes and switchboards including Beckhoff modules, installation of storage racks and cabinets, placement of workshop table, bench drill and other support equipment and tools.



Day of open doors 25. - 26. 01. 2019 - Construction robot and Robot Barman (CTU in Prague, Faculty of Civil Engineering)
Learn how the construction is breathing. Find out what lies under construction, architecture and geodesy. Together we visit the labs, sit in the lecture hall and talk to students and teachers. Shake your hand with the robotic worker, you'll see a membrane architecture studio.



…2018:
Day of open doors 23. - 24. 11. 2018 - Construction robot and Robot Barman (CTU in Prague, Faculty of Civil Engineering)
For both days we have prepared for you a program that will guide you throw process of study and research. At the presentations you will find a lot of brunches and departments at our faculty. Shake your hand with a robotic worker or experience for yourself what a fire experiment looks like.



…2017-2018:
Contract research - 3D printing of test samples (CTU in Prague, Faculty of Civil Engineering + DEK Atelier a.s.)
Modelling, programming, optimization of robotic movements and production of test samples of walls using the additive manufacturing method and the robotic hand KUKA Agilus.
|
|
CTU in Prague, Faculty of Civil Engineering, Department of Construction Technology B482 - Laboratory of Robotization of Structure Processes Contact: vjaceslav.usmanov@cvut.cz |
|
|
|
RoboStav.cz Laboratory of Robotization of Structure Processes |